
تعامل انسان و اسکلت بیرونی رباتیک میتواند اهداف مختلفی داشته باشد. در این زمینه چهار دسته اصلی را میتوان شناسایی کرد: توانبخشی، کمک، تقویت عملکرد و تعامل لمسی.
توانبخشی رباتیک تمرینهای تکراری، منعطف و قابل تنظیم را فراهم میکند تا کار فیزیوتراپیست را تکمیل کند. استفاده از دستگاههای رباتیک در توانبخشی مزایای مهم دیگری نیز دارد، از جمله، انجام حرکات تکراری، انجام توانبخشی در منزل با کنترل از راه دور، تنظیم خودکار پشتیبانی دستگاه بر اساس بهبودی بیمار، افزایش مشارکت بیمار از طریق بازیهای رایانهای، نظارت بر پیشرفت از طریق ارزیابی نتایج به روشی عینی و کاهش هزینه کلی مراقبتهای توانبخشی.
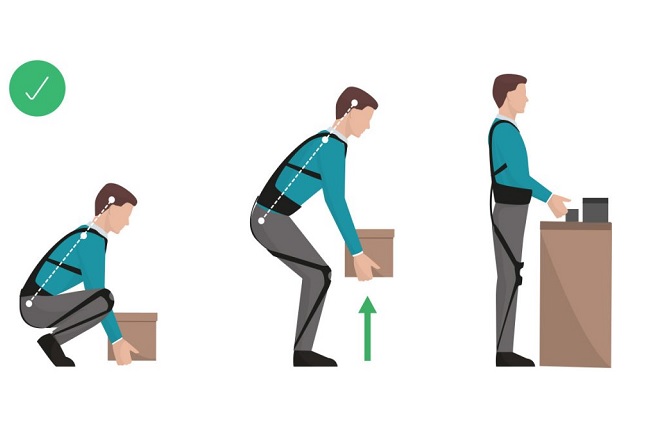
اسکلتهای بیرونی رباتیک کمکی میتوانند به طور مؤثر برای کمک به افراد مسن یا افراد آسیب دیده در انجام مهمترین فعالیتهای زندگی روزمره با استقلال بیشتر، تلاش برای جبران ناتوانیها یا از دست دادن جزئی عملکرد، مورد استفاده قرار گیرند. راه رفتن، در دست گرفتن و بلند کردن اشیا و غذا خوردن برخی از این فعالیتهای اصلی هستند.
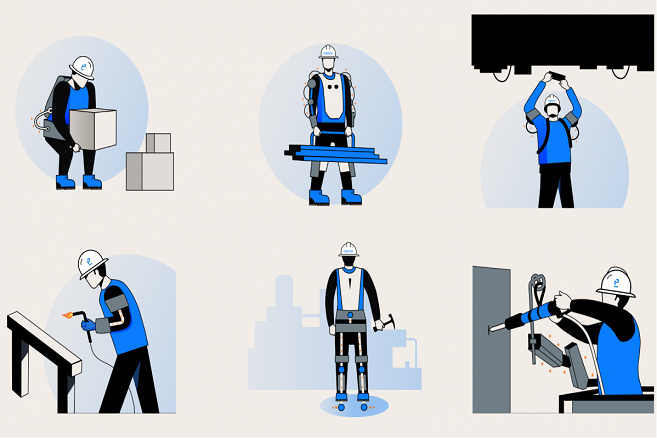
در زمینه وظایف کاری یا نظامی، که شامل فشارهای بسیار شدید به ساختارهای اسکلتی و عضلانی انسان است، استفاده از ربات اسکلتی بیرونی میتواند منجر به بهبود قابل توجه در شرایط عملیاتی و کاهش خطر آسیبهای فیزیکی مرتبط با این نوع وظایف شود. اسکلتهای بیرونی که به طور ویژه برای تقویت عملکرد طراحی شدهاند، قدرت یک ربات را با هوش انسان برای انجام کارهایی ترکیب میکنند که به سختی توسط یک انسان به تنهایی یا یک ربات به تنهایی انجام میشود.
رابطهای لمسی در نظر گرفته شده برای کاربردهای واقعیت افزوده یا واقعیت مجازی را میتوان از طریق اسکلت بیرونی پوشیدنی توسعه داد. هدف اصلی این دسته اسکلتهای بیرونی ارائه سیگنالهای بازخوردی است. اسکلتهای بیرونی که بهعنوان ابزار اندازهگیری یا رابط لمسی شناخته میشوند، نمونههایی از این نوع سامانهها هستند.