رباتیک کمکی پوشیدنی به عنوان یک فناوری امیدوارکننده برای کمک به انسان برای تقویت، تکمیل یا جایگزینی عملکردهای حرکتی اندامها پدیدار شده است. عملکردهایی که معمولاً پس از آسیب دیدگی، سکته مغزی یا در نتیجه پیری طبیعی، تحت تأثیر قرار میگیرد. این کمک رباتیک برای قادر ساختن انسان به انجام فعالیتهای فیزیکی و اجتماعی زندگی روزمره به طور مستقل مهم است و هم به منزلت و هم به بهبود کیفیت زندگی کمک میکند. رباتهای پوشیدنی را میتوان بهعنوان اسکلت بیرونی، ارتز و پروتز دستهبندی کرد که میتوانند قدرت اندامهای انسان را افزایش دهند، عملکردهای از دست رفته یا ضعیف اندام را بازیابی کنند و جایگزین اندامهای از دست رفته شوند.
این وسایل کمکی به گونهای طراحی شدهاند که توسط انسان استفاده میشوند و از نزدیک با بدن انسان ارتباط برقرار میکنند. بنابراین، رباتهای پوشیدنی باید ایمن، قابل اعتماد و هوشمند باشند. همچنین سازگار، سبک و راحت باشند تا از کمک صحیح، ایمنی کاربر و قابل قبول بودن دستگاه اطمینان حاصل شود. این الزامات را میتوان با استفاده از پیشرفتهای فناوری مانند حسگرهای پوشیدنی چندوجهی، مواد نرم و ترکیبی، سامانههای تحریک، ترکیب دادهها، یادگیری ماشین و معماریهای رباتیک به دست آورد.
نیازهای بالینی، گروه های هدف
سازمان بهداشت جهانی (WHO) تخمین میزند تا سال ۲۰۵۰، دو میلیارد نفر به دستگاههای کمکی نیاز خواهند داشت. این افزایش ناشی از رشد جمعیت سالخورده، افراد دچار اختلالات اندام فوقانی و تحتانی، بیماریهای غیرواگیر و شرایط سلامت روان است. دستگاههای رباتیک کمکی پوشیدنی میتوانند کاربران خود را قادر سازند تا به تدریج توانایی انجام کارهای روزمره را بهطور مستقل و طبیعی بازیابی کنند و زندگی سالمتری داشته باشند.
برخلاف اهمیت این فناوری، تنها ۱۰ درصد از کسانی که به کمک نیاز دارند به این وسایل رباتیک دسترسی دارند. این دسترسی محدود چالشی برای آیندهای پایدار برای همه است. آیندهی پایدار یکی از اهداف توسعه است که توسط سازمان ملل شناسایی شده و تلاش میکند “هیچکس را پشت سر نگذارد”. همکاری جهانی در زمینه فناوری کمکی ابتکار دیگری است که برای بهبود دسترسی جهانی به وسایل کمکی، از جمله پوشیدنیهایی مانند آشکارسازهای سقوط، سمعکها و پروتزهای اندام تحتانی ایجاد شده است.
گسترش فناوریهای هوشمند و پوشیدنی، مجموعهای قوی از ابزارها را برای توسعه رباتهای کمکی پوشیدنی ارائه میدهد که میتواند بر جنبههای فیزیکی و اجتماعی کاربران تأثیر مثبت بگذارد. همچنین پوشیدنیها نسبت به سایر اشکال فناوریهای کمکی، نزدیک و مداوم با کاربر و بدن انسان است و مزیتهای بیشتری دارد. این ویژگی سامانهها را قادر میسازد تا دادههای حیاتی را جمعآوری کنند و کمکهای سفارشیشده را برای افراد با سطوح مختلف اختلالات فیزیکی، حسی و شناختی ارائه دهند.
رباتهای کمکی پوشیدنی با هدف کمک به انسانهایی که دچار آسیبهای فیزیکی هستند، به ویژه کمک به اندامهای تحتانی و فوقانی و مفاصل بدن انسان طراحی شدهاند. این رباتها که در مجاورت بدن انسان کار میکنند، میتوانند با استفاده از مواد مختلف ساخته شوند که معمولاً از مواد سفت، نرم یا ترکیبی از این دو تشکیل شدهاند:
مواد سفت و سخت در رباتیک پوشیدنی
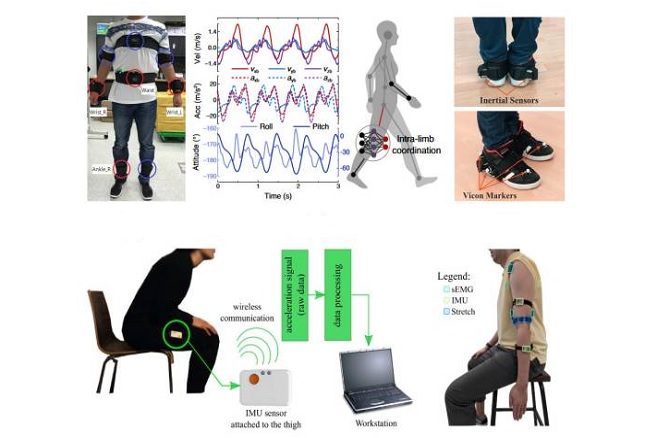
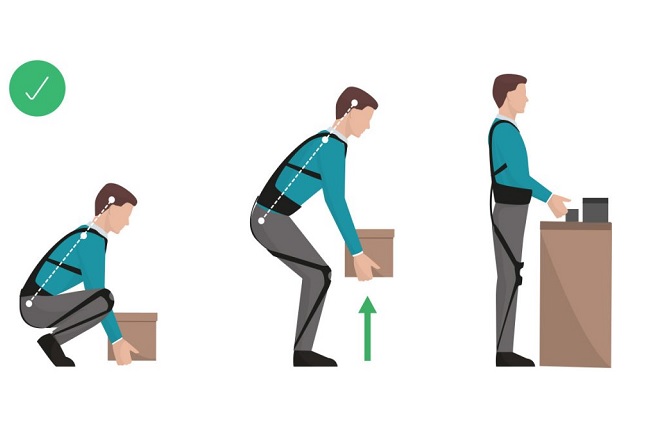
مواد سفت و سخت و نیمه سخت به طور سنتی برای توسعه اسکلتهای بیرونی استفاده میشود که به طور گسترده برای کمک به فعالیتهای حرکتی کاربرد دارد. آنها میتوانند به انسان کمک کنند تا تعادل خود را حین راه رفتن حفظ کند، همچنین میتوانند فعالیتهای روزمره از جمله نشستن، بالا رفتن از پلهها و زانو زدن را انجام دهند. رباتهای پوشیدنی برای بالاتنه و دست میتوانند به انجام فعالیتهای روزمره مانند بستن دکمهها، گرفتن اشیا، ریختن نوشیدنی، بستن و باز کردن زیپها و درب شیشهها کمک کنند. دستگاههای اندام تحتانی و فوقانی را میتوان برای پاسخ سریع به قصد حرکتی کاربر با استفاده از دادههای الکترومیوگرافی (EMG)، واحد اندازهگیری اینرسی (IMU) و حسگرهای گشتاور پیکربندی کرد. متأسفانه، این دستگاهها حجیم، سنگین (رباتهای اندام تحتانی با وزن بین ۱۵ تا ۲۵ کیلوگرم) و گران هستند. ساختار سفت و سخت این رباتها میتواند آنها را ناراحت کند و حرکت طبیعی اندامهای انسان را در جهتهای خاص محدود کند.

مواد نرم در رباتیک پوشیدنی
مواد نرم در حوزه رباتیک کمکی با سامانههای مختلفی که در سالهای اخیر برای کمک به اندامهای فوقانی و تحتانی توسعه یافتهاند، محبوب شدهاند. رباتهای کمکی با مواد نرم در مقایسه با رباتهای دارای ساختار سفت و سخت، سبکتر و راحتتر هستند. ماهیچههای مصنوعی پنوماتیک، کابلهای Boden، منسوجات و آلیاژهای حافظهدار شکلی، فناوریهای اصلی هستند که در انواع رباتهای نرم پوشیدنی به کار رفتهاند.
رباتهای پوشیدنی زانو و مچ پا برای کمک به حرکات انقباض و اکستنشن پا و همچنین حرکات چرخشی پا در جهتهای دورسیفلکشن، پلانتارفلکشن، چرخش داخلی و خارجی در مچ پا (اینورژن و اورژن) استفاده شده است. اسکلتهای بیرونی با استفاده از منسوجات و کابلهای Boden برخی از پیشرفتهترین و سبکترین وسایل برای کمک به لگن، ساق پا و مچ پا هنگام راه رفتن روی سطوح صاف هستند. دستکشهای نرم و پوشیدنی برای قسمت مچ دست و آرنج برای کمک به گرفتن، نگهداشتن و دستکاری اشیا و همچنین برای کمک بالقوه به باز و بسته کردن دکمهها و غذا خوردن (نگه داشتن کارد و چنگال) مورد بررسی قرار گرفتهاند.
سامانههای مدولار و قابل تنظیم که قادر به تطبیق با بدن کاربر و کمکهای مورد نیاز هستند، با طراحیهای مبتنی آلیاژهای حافظهدار شکلی و فناوری پنوماتیک نیز مورد مطالعه قرار گرفتهاند. مواد نرم یک رویکرد امیدوارکننده برای رباتهای کمکی پوشیدنی ارائه میدهد که راحت و سبک وزن هستند و حرکت اندامهای فوقانی و تحتانی را محدود نمیکنند.