
اسکلت بیرونی نقش مهمی در کمک و توانبخشی برای افراد دچار معلولیت حرکتی ایفا میکند. با این حال، پیش از استقرار گسترده اسکلتهای بیرونی در زندگی روزمره، سه الزام باید برآورده شود: توانمندسازی، تجسم و چابکی.
نخستین شرط یک پیش نیاز اساسی است که اسکلتهای بیرونی باید به کاربر دچار معلولیت حرکتی قدرت دهند تا به طور معمول بایستد و راه برود. استراتژیهای کنترل آتی باید مشکل حفظ تعادل را حل کنند، نه اینکه کاربر فلج را بطور غیرفعال به یک اسکلت بیرونی دست و پا گیر ببندد که با پاهایی بزرگ تعادل خود را حفظ میکند. در مورد بیماران همیپارزی (فلج خفیف یک سویه) با مهارت جزئی در حفظ تعادل، اسکلت بیرونی آینده باید دارای پهنای باند بالا و پاسخ سریع به نیت انسان باشد. این برای کاربران مهم است که به صورت اختیاری به سامانه دستور دهند تا تعادل را بازیابی کند.
افزونبر تعادل، کل فرآیند راه رفتن باید به دقت طراحی شود به طوری که موجب صرفهجویی در مصرف انرژی شود و مطابق با دستورالعملهای پزشکی باشد. پس از آن، ردیابی راه رفتن مطلوب (چه به صورت آفلاین تعریف شده یا در لحظه ایجاد شده باشد) ممکن است به یک مدل دینامیک دقیق نیاز داشته باشد. همچنین انتظار میرود سیگنالهای زیستی آینده برای ایجاد یک مدل دینامیک دقیق، رمزگشایی شوند.
دومین نیاز برای اسکلتهای بیرونی آینده تجسم است. هر زمان که انسان حرکتی را انجام میدهد، سیگنال عصبی از مغز و از طریق نخاع و عصب محیطی عبور میکند تا به عضله برسد. اسکلت بیرونی در حالی با تشخیص نیت انسان کمک مناسبی به سیستم اسکلتی عضلانی میکند که بازخورد حس عمقی به مغز برای بستن حلقه کنترلی حرکت انسان ایجاد شود. اسکلتهای بیرونی آینده باید به اندازه کافی قابل پیشبینی باشند تا بازخورد واقعی حس عمقی با تخمین مغز مطابقت داشته باشد. به دلیل انعطافپذیری مغز، این قابلیت پیشبینی به کاربر اجازه میدهد تا اسکلت بیرونی را در طرحواره بدن خود جذب کند تا کاربران بتوانند از آن نه به عنوان ابزار، بلکه به عنوان بخشی از بدن خود استفاده کنند.
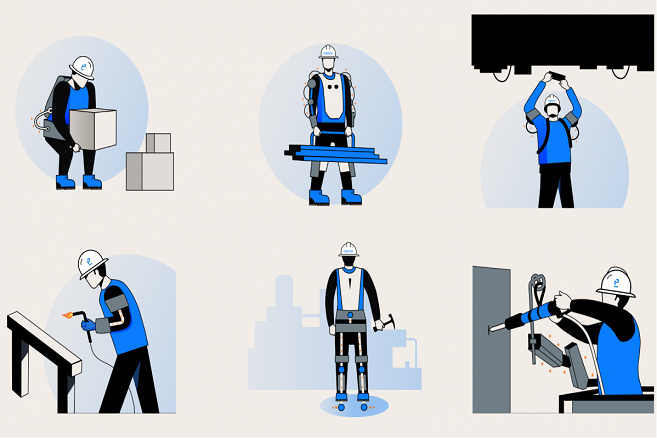
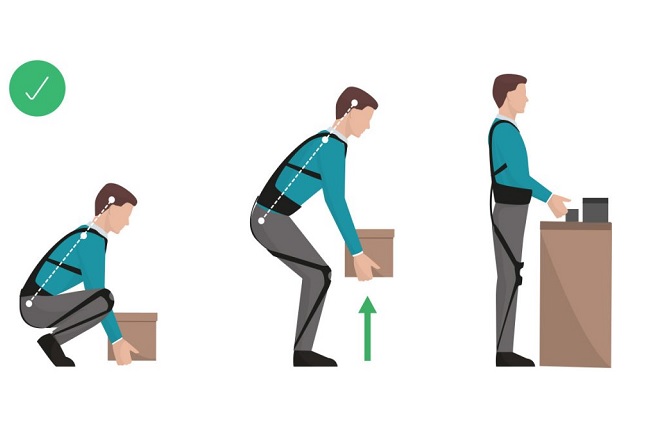
همچنین اسکلت بیرونی آینده باید نیاز چابکی را برآورده کند. این برای کاربرانی است که به سرعت حرکات پیچیده مانند انتقال از حالت نشسته به ایستاده و پایین آمدن یا بالا رفتن از پله را انجام دهند. افزونبر این، توانایی پیمایش مسیرهای پیچیده و حرکت در میان موانع متحرک نیز مورد نیاز است.